
Teaching
Online Resources (Simulation Models)
4 Link Robotic Simulator Download | Spring mass walking Download | Spring mass running Download |
Rimless wheel model  Download | CPG simulation models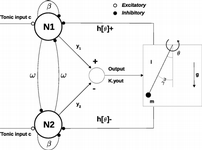 Download | Taga biped model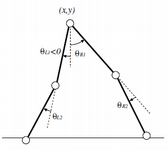 Download |
| C-shape curved beam robot hopping 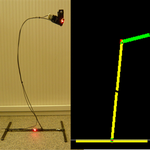 Download | U-shape curved beam robot locomotion 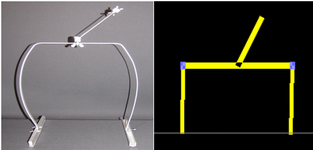 Download | Actuated 1D spring-mass hopping Download 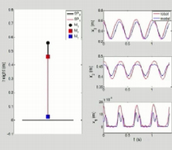 Download |
SVAS3 : Strain vector aided sensorization of soft structures Download | Geyer Neuromuscular Model Download | Hot Glue Kit Download |
| Bayesian Optimisation of SLIP model Download | ||
Online Resources (Experimental Data)
- Falling Paper Shapes: Detection and Classification (Toby Howison)
- Falling Paper Shapes: Experimental Data (Toby Howison)
- Dishwasher Unloading: Canteen Tray Data (Isobel Voysey)
- Teaching by OpenPose demonstration: Pancake cooking (Dylan Danno)
- Gaussian Process Inference Modelling of Dynamic RobotControl for Expressive Piano Playing (Cheryn Ng, Luca Scimeca)
- Joint Entropy-based Morphology Optimization of Soft Strain Sensor Networks for Functional Robustness (Thomas Thuruthel)
