
INTERNATIONAL CONFERENCE ON SOFT ROBOTICS 2022
There has been a long-standing philosophical debate about the relationship between body and mind. Today this debate still powers a profound scientific desire to deepen our understanding of the nature of both animals’ and machines’ intelligent, adaptive behavior. To gain further insights into intelligence and explore how our brain and whole selves develop through physical interactions with the world, Embodied Intelligence places the physical entity of the human body at the center of this subject. In the age of AI and Machine Learning, Embodied Intelligence research remains highly important as it can deliver valuable input which enhances the impact of conventional AI technology.
Soft Robotics research has recently shown how conceptual issues of Embodied Intelligence can be turned into physical reality. Only by promoting the soft robotics technologies towards a more Embodied Intelligence framework, will the technologies reach the next level of autonomous adaptive systems.
The organizers of this workshop also annually organize the International Conference on Embodied Intelligence (https://embodied-intelligence.org/) conference to discuss these various challenges. Last year, the conference attracted over 100 speakers and 1000 participants, reflecting both the importance and the necessity of this research discussion within the collaborative community.
This workshop aims to continue the stimulating discussions in the workshop, and strengthen the participation of soft robotics researchers.
PROGRAM
SPEAKERS:
- Josh Bongard, Department of Computer Science, University of Vermont, USA
- Kohei Nakajima, Graduate School of Information Science and Technology, University of Tokyo, Japan
- Metin Sitti, Physical Intelligence Department, Max Planck Institute for Intelligent Systems, Germany
- Perla Maiolino, Engineering Science Department, University of Oxford, UK
- Oliver Brock, Dept. of Computer Engineering and Microelectronics, Technical University of Berlin, Germany
- Dario Floreano, Laboratory of Intelligent Systems, EPFL, Switzerland
- Barbara Mazzolai, Centre for Micro-BioRobotics, Istituto Italiano di Tecnologia (IIT), Italy
- Thrishantha Nanayakkara, Dyson School of Design Engineering, Imperial College London, UK
- Li Wen, School of Mechanical Engineering and Automation, Beihang University, China
- Kyu-Jin Cho, Department of Mechanical Engineering, Seoul National University, Korea
- Cecilia Laschi, Department of Mechanical Engineering, National University of Singapore, Singapore
- Jonathan Rossiter, Department of Engineering Mathematics, University of Bristol, UK
- Daniela Rus, Department of Electrical Engineering and Computer Science, MIT, USA
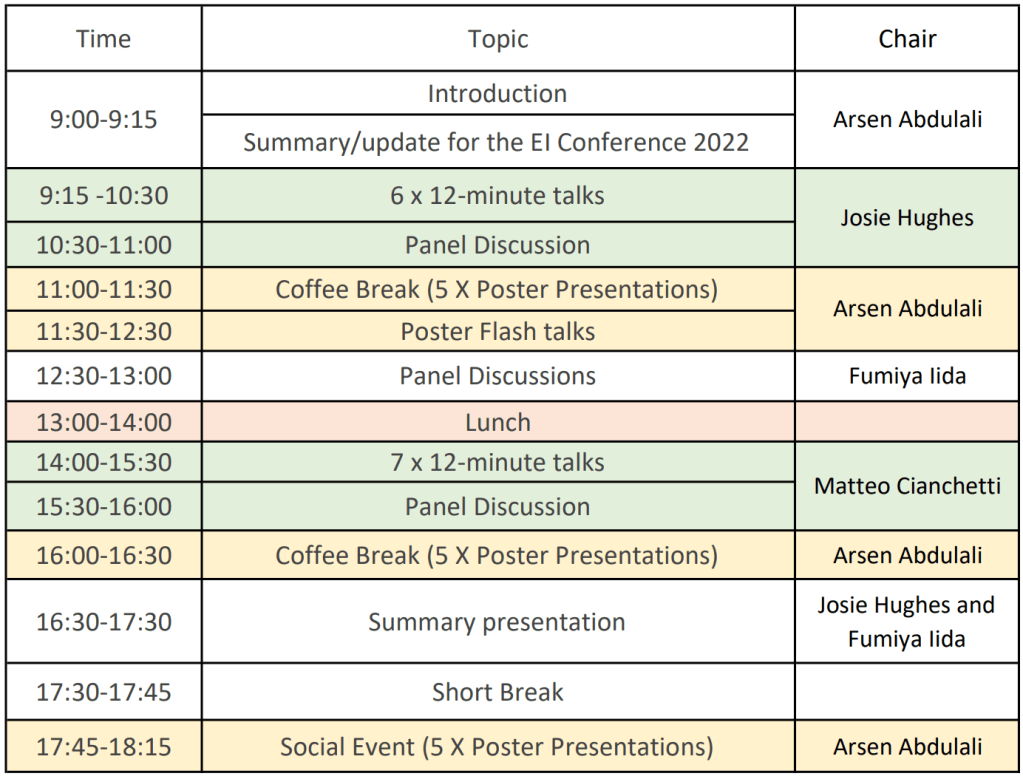
Time table:

POSTER PRESENTATION
There are three poster sessions in total (see Yellow rows in the table of the program above). The Morning and Afternoon sessions are presented during the coffee breaks. The audience will be invited to attend the poster stands during the workshop. All authors should print and bring the poster to the conference venue. The instructions for each session are summarized below.
Morning session:
The posters of the morning session should be attached to the designated stands in the morning before the start of the workshop. We recommend bringing and mounting your poster at 8:30 BST. The posters should be removed from the stands at the beginning of the lunch break, i.e., 13:00 BST.
- Elijah Almanzor, Automated Fruit Quality Testing using an Electrical Impedance Tomography-Enabled Soft Robotic Gripper.
- Leone Costi, Soft Control Interface for Remote Palpation.
- Muhammad Sunny Nazeer, Complex control policy generation for soft robotic arm.
- Jeref Merlin, Percutaneous needle insertion using a soft robotic mechanism.
- L. C. (Luuk) van Laake, Reprogrammable sequential activation of soft actuators.
Afternoon session:
The posters of the afternoon session should be attached to the designated stands during the lunch break. We recommend bringing and mounting your poster at 13:30 BST. The posters should be removed from the stands after the presentation during the short break, i.e., 16:30 BST.
- Fan Ye, Simulation of Collective Bernoulli-Ball System for Characterizing Dynamic Self-stability and State Transitions.
- David Hardman, Reinventing Plinko: The dynamic effects of passive morphologies in the Galton Board.
- Seppe Terryn, Self-Healing Soft Robots
- Vanni Consumi, Design of the SOFTScreen Capsule for Colonoscopy and Experimental Validation in Colon Phantom.
- Kieran Gilday, Design and Control of a Multi-Modal Soft Gripper Inspired by Elephant Fingers
Evening session:
The posters of the evening session should be attached to the designated stands during the short break at 16:30 BST. The posters should be removed at the end of the workshop, i.e., 18:30 BST.
- Grzegorz Sochacki, Mastication-Enchanced Tasting
- Ryman Hashem, SoRSS: A Soft Robotic Stomach Simulator for Bio-mimicking Stomach Anatomy and Motility.
- Huijiang Wang, Model the Soft Finger Piano Keystroke with a Mass-spring-damper.
- Seyedreza Kashef Tabrizian, Self-targeting heating/healing in soft robotics.
- Ronald H Heisser, Small, densely embedded engines for smart, soft mechanical systems.
Teaser Presentation:
The authors of the accepted posters will present their teaser at the Poster Flash Talk session. The duration of this presentation is limited to 3 minutes. The authors can attract the attention of the audience and invite them to visit the poster stand of the corresponding poster session. We recommend delivering rather the general idea of the work than the technical details of the implementation.
Teasers of the accepted posters:
ORGANIZERS:
Arsen Abdulali, Department of Engineering, University of Cambridge.
Fumiya Iida, Department of Engineering, University of Cambridge.
Josie Hughes, School of Engineering, EPFL.
Matteo Cianchetti, BioRobotics Institute, Sant’Anna School of Advanced Studies.
CALL FOR POSTER PRESENTATION
We welcome researchers in the field to submit posters to be presented during the workshop (see the program above). Submitted posters should be in a *.pdf format. Additionally, the poster presenters should submit a single PowerPoint presentation slide (*.pptx) with a teaser that explains their research. The submitted contributions will go through a single-blind review process and be selected based on the originality, technical contributions, clarity in presentation, and relevance to the workshop topics. The work-in-progress research is also welcomed. For submission, please use the submission form in https://forms.gle/vPJxmwj4uWcxYcxx6. Upon acceptance, the presenters should print the poster and bring it to the conference venue. Also, note that presenters need to be registered at the RoboSoft conference, at least for the day of the workshop. The deadline for the poster submission is 25 March 2022, 11:59 PM GMT. If you have any questions and feedback, please directly send the email to Arsen Abdulali (aa2335 [at] cam.ac.uk). All submitted emails should follow a subject as “RoboSoft-22 workshop submission.”
